
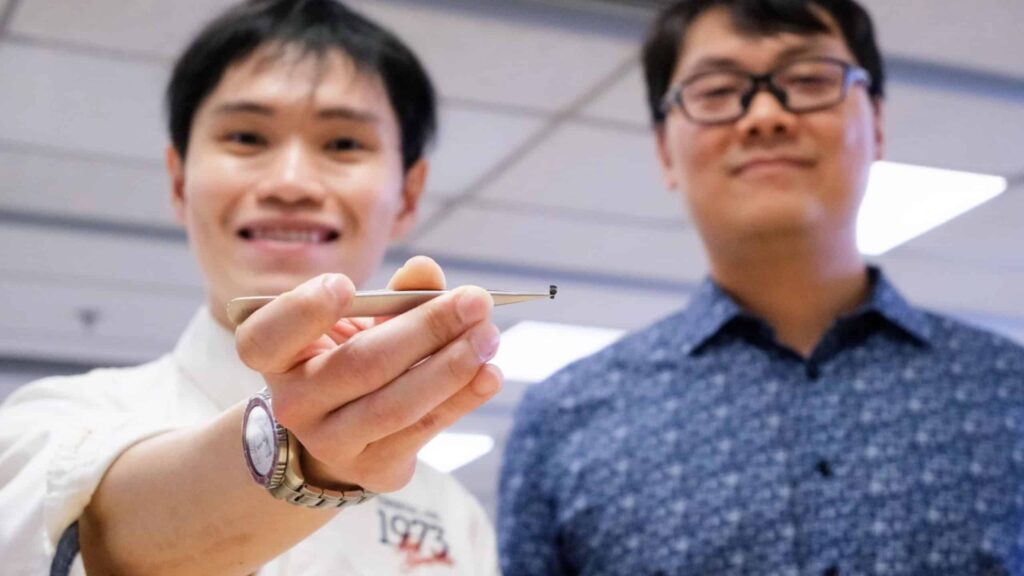
Investigadores de la Universidad Tecnológica de Nanyang en Singapur han creado un robot quirúrgico del tamaño de una semilla capaz de realizar cinco funciones diferentes: mover, cortar tejido, administrar medicamentos, tomar y almacenar muestras, además de generar calor de forma remota. El dispositivo sólo mide 4,4mm y está controlado por campos magnéticos débiles.
La idea es allanar el camino para procedimientos médicos menos invasivos, en los que pequeños robots podrían navegar por regiones estrechas e irregulares del cuerpo para realizar tareas localizadas, reduciendo la necesidad de grandes incisiones o instrumentos quirúrgicos voluminosos.
Cinco funciones en un cuerpo microscópico
El gran avance no es sólo el tamaño, sino la combinación de funciones. Muchos microrobots magnéticos pueden moverse o realizar una tarea sencilla. El prototipo NTU fue diseñado para cambiar entre diferentes modos de acción en menos de un segundo.
En pruebas de laboratorio, el robot pudo cortar tejido biológico, liberar partículas que simulan medicamentos, retener muestras, almacenarlas y generar calentamiento localizado cuando se expone a un campo magnético alterno de alta frecuencia.
Este calentamiento es particularmente interesante porque se relaciona con la investigación sobre la hipertermia magnética, un método estudiado para atacar células no deseadas, como las células tumorales, mediante calor controlado. Aun así, en este caso estamos hablando de una demostración experimental, no de un tratamiento clínico ya preparado.
¿Cómo se controla?
El robot utiliza materiales magnéticos flexibles, incluidas siliconas comunes en la robótica blanda, como PDMS y Ecoflex. Estos materiales se mezclan con micropartículas magnéticas, lo que permite que diferentes regiones del robot respondan de manera específica al campo aplicado.
El secreto está en el módulo magnético central, que puede magnetizarse, desmagnetizarse y remagnetizarse en diferentes direcciones. Cada orientación activa una función diferente. Esto resuelve una limitación común en los microrobots: a escalas tan pequeñas, el campo magnético tiende a mover todo el dispositivo, lo que dificulta el control independiente de herramientas específicas.
El proyecto añade además un sexto tipo de movimiento: rodar sobre su propio eje. Según los investigadores, esto ayuda al robot a posicionarse mejor en ambientes estrechos, blandos e irregulares, como los que se encuentran dentro del cuerpo humano.
lo que todavía falta
La investigación fue publicada en la revista. Materiales avanzados y aún se encuentra en fase de laboratorio. Las pruebas involucraron modelos de tejido que incluyen hígado de pollo y materiales de gelatina que simulan tejido blando. El equipo también evaluó la biocompatibilidad de los materiales con células de la piel humana en el laboratorio, y más del 99% de las células permanecieron viables en las condiciones probadas.
El próximo desafío es enorme: integrar el robot con sistemas de imágenes, sensores y modelos de órganos artificiales más realistas. Después de eso, todavía habría estudios preclínicos, validación de seguridad, pruebas en animales y, eventualmente, ensayos clínicos.
Incluso lejos de los hospitales, el concepto muestra hacia dónde puede llegar la cirugía mínimamente invasiva: robots cada vez más pequeños, más versátiles y capaces de hacer más que simplemente moverse.
Continue lendo

Avión eléctrico tripulado vuela por primera vez con batería de estado sólido
Um avião elétrico experimental da Helios Horizon realizou voos tripulados com baterias de estado sólido, tecnologia que pode…

Esta motocicleta eléctrica para 'principiantes' cuesta 38.000 dólares y la factura es difícil de pagar
A Novus One quer misturar bicicleta elétrica, scooter e moto leve em um único veículo urbano. O problema…

El casco intercomunicador de malla liviano conecta hasta 15 usuarios a la vez
Lumos es una empresa conocida por diseñar cascos de bicicleta con sistemas de iluminación integrados. Sus modelos anteriores…